USE CASE: Preventing rear-end collisions by enhancing road intersection safety
Rear-end collisions are a major road safety problem, particularly at intersections with traffic lights. Using swarm intelligence, Aalto University and Conveqs Oy are introducing a new approach to tackle the problem through connected and cooperative traffic management that deploys the technologies provided by the SmartEdge project.
It has been measured that around 30% of accidents at intersections with traffic lights are rear-end collisions. The dangerous moment comes when the green signal is about to end, as some vehicles may decide to pass while others may decide to stop. The area where these two different choices are most likely to happen is called the option-zone. Various detection methods have been developed to alleviate the problem, but they all rely on passively waiting for safe conditions to appear in the option-zone. This can lead to sub-optimal traffic light performance and intersection, which can be avoided by our solution that uses swarm intelligence to take pro-active measures to prevent high-risk situations.
Smart Junction test site
Our test site, which is part of the Mobility Lab Helsinki, consists of six consecutive signal-controlled intersections. The Smart Junction test area (Figure 1) is equipped with a smart infrastructure including sensors that measure traffic at each intersection from all directions using a unit comprising a radar, an IP-camera, and a processing and communication unit. Additionally, we have access to signal controllers to read the status of each traffic signal in real time. During the project, we will also develop an interface to take control of the traffic lights with our own software. Aalto University has research vehicles equipped with sensors, connectivity and automation to carry out field demonstrations of the proposed solution. The connected vehicles will exchange standardized messages to exchange data (C-ITS). In our test setting, there is a roadside unit (RSU) communicating with on-board units (OBU) of the cars (Figure 1).
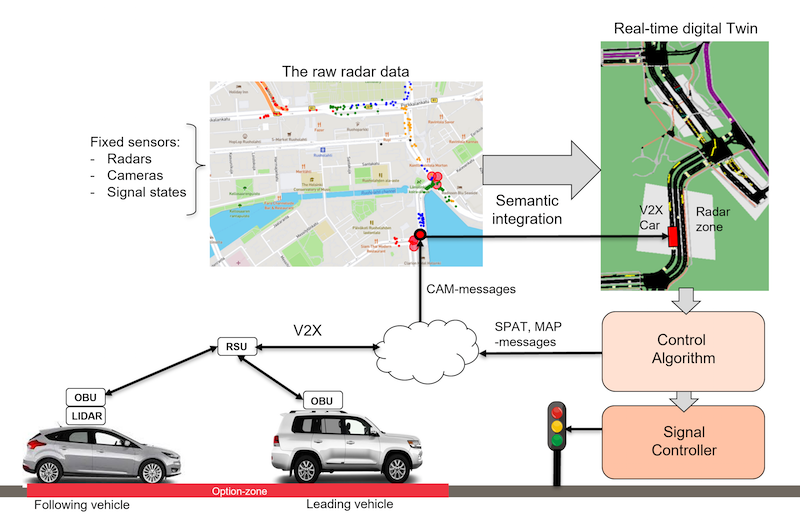
Figure 1: The Smart Junction test site and demonstration of pro-active option-zone management
Digital twin and the option-zone application
The raw data from the sensors is transformed into a holistic picture of the real-time traffic situation (digital twin, DT) including the type, position, speed and direction of each road user, including pedestrians and bicycles. Any application that needs traffic data only needs to access the digital twin and can therefore ignore sensor-related details such as position, range, configuration, etc. [1].
In our demonstration of active option-zone management, the application examines the traffic situation at the option-zone (via the digital twin) when the green signal is about to end. If it looks like there will be more than one vehicle in the option-zone before the green light ends, then active measures will be taken. Firstly, the signal control algorithm selects the two consecutive approaching vehicles based on its prediction of optimal end-of-green time. Secondly, if the last vehicle is too close to the lead vehicle, it receives a warning/recommendation to slow down. This action needs to be taken proactively, so that the distance between vehicles reaches a safe value in time, should the first vehicle decides to stop.
Change of paradigm
The option-zone application is just one demonstration of the more general idea of connected and cooperative swarm intelligence in traffic management. In conventional traffic management, only traffic lights are actuators in the control loop. However, in the context of connected traffic management powered by swarm intelligence, vehicles also play the role of actuators (I2V). Vehicles equipped with their own sensors can provide additional traffic data (V2I). Sensors at neighboring intersections can communicate via the digital twin (I2I) to exchange data, which is important for early hazard detection and proactive reaction.
The use of semantic integration both with fixed and mobile sensor data provides a machine-readable and machine-understandable description of the real-time/forecast traffic situation. This is essential for many other connected traffic management applications.
Author: Iisakki Kosonen (Aalto University)
Reference
[1] Kosonen, I., Koskinen, K. & Kostiainen, J. (2021). Real-time traffic data applications in the Mobility Lab of Helsinki – Case Smart Junction. ITS World Congress, 11-15 October 2021, Hamburg
Acronyms definition
C-ITS = Cooperative Intelligent Transport Systems (C-ITS)
RSU = Road Side Unit
OBU = On-Board Unit
DT = Digital Twin
I2V = Invisible-to-Visible
V2I = Vehicule-to-Infrastructure
I2I = Infrastructure-to-Infrastructure
V2X = Vehicle-to-Everything