Semantic low-code programming tools for edge intelligence
SmartEdge’s primary goal is to provide an comprehensive toolchain that simplifies the process of building edge intelligence. By leveraging semantic descriptions of sensing and computing capabilities, along with data queries, the SmartEdge toolchain strives to detach application logic from the intricate layers of software, hardware, and networking components.
Semantic descriptions and specifications play a vital role in seamlessly integrating these elements into execution pipelines during runtime, eliminating the need for prior knowledge. As a result, the semantic data model acts as the unified representation of data, serving as the integration nexus for all SmartEdge low-code components.
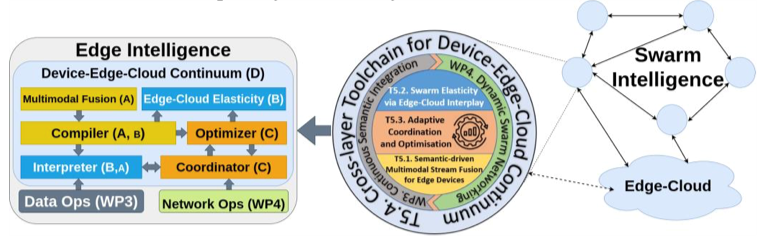
Deliverable D5.1 introduces the first design iteration of low-code programming tools customized for Edge Intelligence. This document focuses on the design of four components that will be essential in the toolchain, enabling easy access to information about swarm devices and their environment through SPARQL queries:
- Semantic-driven multimodal sensor fusion for edge devices,
- Swarm elasticity via cloud-edge interplay,
- Adaptive coordination and optimization,
- Cross-layer toolchain for device-edge-cloud continuum.
The artifacts of such tools will be integrated and deployed as a runtime for a SmartEdge swarm node as illustrated below:
From SmartEdge low-code toolchain to SmartEdge runtime
Multimodal sensor fusion
The objective of the multimodal sensor fusion is to develop components that can merge multimodal stream data into high-level information, ensuring interoperability at semantic levels as defined in WP3 (ref. to the post about D3.1) . To accomplish this, the sensor fusion of multimodal data utilizes RDF as the intermediate data representation among the operations, offering unified input/output data presentations for operators, which can then be processed and integrated in subsequent Low-Code components.
Swarm elasticity
In the effort to separate application logic from the underlying platform, swarm elasticity through cloud-edge interaction focuses on transferring some computations from edge nodes to potentially more powerful or better-connected nodes (e.eg. specialized SmartEdge nodes with acceleration capabilities, nodes in the cloud, or well-connected central nodes or switches).
A declarative programming approach for low-code programming across various layers (such as network, RDMA, sensor fusion, orchestration, optimization, and runtime) provides different domain-specific languages (DSLs) that can be seamlessly integrated using the RDF data model and graph query patterns. Specifically, swarm elasticity via cloud-edge interaction allows multimodal sensor fusion operations to be offloaded using graph query patterns, while adaptive coordination and optimization manage federated processing workloads represented in SPARQL-like query languages.
Lastly, the SmartEdge runtime progresses by utilizing RDF data as Dynamic Knowledge Graphs (DKGs), merging conventional knowledge graphs with semantic streams. DKGs streamline the integration of sensory data from sensor fusion with operational and environmental data, such as network telemetries, hardware configurations, training data, and host environments, into a queryable format using graph query languages like SPARQL. This enables SmartEdge nodes to access this data programmatically in a unified view, dispersed across the network.
For more information, check the full version of Deliverable 5.1: “Design of low-code programming tools for edge intelligence”.